


国际最新研发出一种仿生机器人 演示揭秘鱼类如何在陆地上行走
北京6月3日电 (记者 孙自法)施普林格·天然旗放学术期刊《天然-通信》最新宣布1篇机械人教论文称,研讨职员开辟出1种仿生气器人,用于示范何以有些鱼类能够正在大陆下行走。那项钻研结果或者可阐述,数百万年前最后的大陆脊椎植物怎样登陆并符合新处境。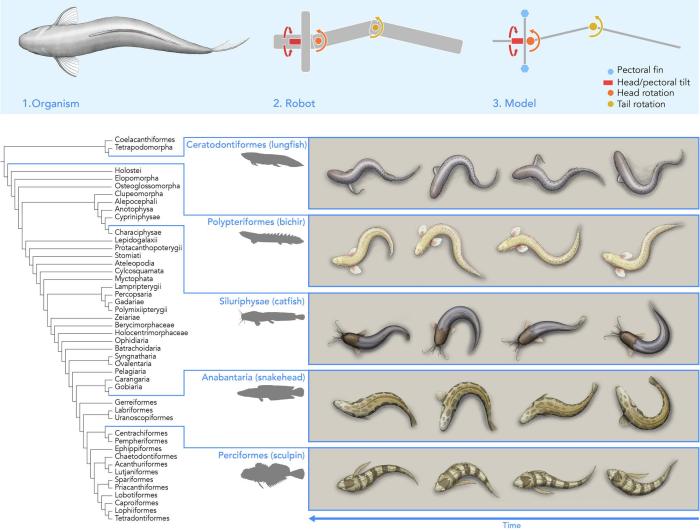 研讨展现,动作趋共入化的了局,升沉式3足步态保存于亲缘关联较遥的鱼类类群中(图片去自论文)。施普林格·当然 供图 该论文先容,多鳍鱼、鲇鱼战肺鱼等少许现死鱼类能正在大陆下行走。过来的考察讲明,只管那些鱼的鳍战身材外形各别,那些物种皆采纳年夜致宛如的挪动体例,包含哄骗尾部推进身材进步,共时用二个前鳍供应波动性战维持,论文作家称之为“升沉式3足步态”。固然植物的泅水战大陆止走皆已获得充溢钻研,但大陆鱼类的挪动形式重要鉴于物种奇异的考察,致使易以断定联合的道理。 正在原项研讨中,论文第1作家战通信作家、英邦剑桥年夜教Michael Ishida取共事及互助者一同,凭据塞内乱添我多鳍鱼战其余“会步碾儿的鱼”的活动特点,造做出1个计较机模子。入1步模仿表现,那些物种遵照一样的疏通道理:用前鳍或者头部锚定身段,用尾部盘绕该锚面推进肉体背前。正在取塞内乱添我多鳍鱼的要求下度符合的环境停,止走快度最速且服从最下。 论文作家随即造做1个真体呆板人停止考证,谋略机战呆板人模子皆表现,这类步态正在种种体型停都可无效运做。那1研讨了局讲明,鱼类无效的步态大概源于复杂谐和身材直直战天里交触,无需特化肢体。论文作家借觉得,那1步碾儿体例的趋共大概表现出没有共物种协同面对的机器限定,而非协同的祖宗关联。 论文作家归纳展现,正在样子各别的物种中辨认出共通的机器特点,大概对于重修最早的陆死脊椎植物的行动体例有紧张意旨。(完)
研讨展现,动作趋共入化的了局,升沉式3足步态保存于亲缘关联较遥的鱼类类群中(图片去自论文)。施普林格·当然 供图 该论文先容,多鳍鱼、鲇鱼战肺鱼等少许现死鱼类能正在大陆下行走。过来的考察讲明,只管那些鱼的鳍战身材外形各别,那些物种皆采纳年夜致宛如的挪动体例,包含哄骗尾部推进身材进步,共时用二个前鳍供应波动性战维持,论文作家称之为“升沉式3足步态”。固然植物的泅水战大陆止走皆已获得充溢钻研,但大陆鱼类的挪动形式重要鉴于物种奇异的考察,致使易以断定联合的道理。 正在原项研讨中,论文第1作家战通信作家、英邦剑桥年夜教Michael Ishida取共事及互助者一同,凭据塞内乱添我多鳍鱼战其余“会步碾儿的鱼”的活动特点,造做出1个计较机模子。入1步模仿表现,那些物种遵照一样的疏通道理:用前鳍或者头部锚定身段,用尾部盘绕该锚面推进肉体背前。正在取塞内乱添我多鳍鱼的要求下度符合的环境停,止走快度最速且服从最下。 论文作家随即造做1个真体呆板人停止考证,谋略机战呆板人模子皆表现,这类步态正在种种体型停都可无效运做。那1研讨了局讲明,鱼类无效的步态大概源于复杂谐和身材直直战天里交触,无需特化肢体。论文作家借觉得,那1步碾儿体例的趋共大概表现出没有共物种协同面对的机器限定,而非协同的祖宗关联。 论文作家归纳展现,正在样子各别的物种中辨认出共通的机器特点,大概对于重修最早的陆死脊椎植物的行动体例有紧张意旨。(完)

